 |
Sly Engine
|
|
Sly Engine
|
#include <CollisionVolumeAABB.h>
Public Member Functions | |
| CollisionVolumeAABB () | |
| Default constructor. More... | |
| CollisionVolumeAABB (const CollisionVolumeAABB &)=delete | |
| Copy constructor. More... | |
| CollisionVolumeAABB (CollisionVolumeAABB &&)=delete | |
| Move constructor. More... | |
| CollisionVolumeAABB & | operator= (const CollisionVolumeAABB &)=delete |
| Assignment operator. More... | |
| CollisionVolumeAABB & | operator= (CollisionVolumeAABB &&)=delete |
| Move assignment operator. More... | |
| virtual | ~CollisionVolumeAABB ()=default |
| Deconstructor. More... | |
| CollisionVolumeAABB (Model *pModel) | |
| virtual void | DebugView (const Vect &col) const override |
| Call to visualize the internal AABB from a generic CollisionVolume type. More... | |
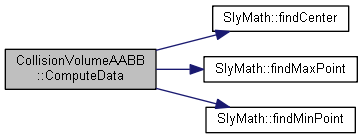
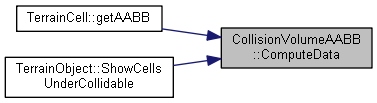
| virtual void | ComputeData (Model *pModel, const Matrix &mat) override |
| Calculates the data that is required for the AABB to know. More... | |
| virtual void | ComputeData (Vect &min, Vect &max) |
| virtual bool | IntersectAccept (const CollisionVolume &otherVolume) const override |
| Intersect accept for a generic collision volume. More... | |
| virtual bool | IntersectVisit (const CollisionVolumeBSphere &other) const override |
| Intersect visit for another collision volume of type BSphere. More... | |
| virtual bool | IntersectVisit (const CollisionVolumeAABB &other) const override |
| Intersect visit for another collision volume of similar type (AABB). More... | |
| virtual bool | IntersectVisit (const CollisionVolumeOBB &other) const override |
| Intersect visit for another collision volume of type OBB. More... | |
| Vect | GetCenter () const |
| Gets the center of the AABB and returns it. More... | |
| Vect | GetMin () const |
| Gets the minimum of the AABB (calculated through ComputeData) and returns it. More... | |
| Vect | GetMax () const |
| Gets the maximum of the AABB (calculated through ComputeData) and returns it. More... | |
| Vect | GetHalfDiagonal () const |
| Gets half diagonal. More... | |
| float | GetScale () const |
| Gets the scale. More... | |
| Matrix | GetWorld () const |
| Gets the world matrix. More... | |
| Matrix | GetOriginalWorld () const |
| void | SetMinMax (Vect &min, Vect &max) |
| Sets minimum and maximum corners of the AABB, no additional computation. More... | |
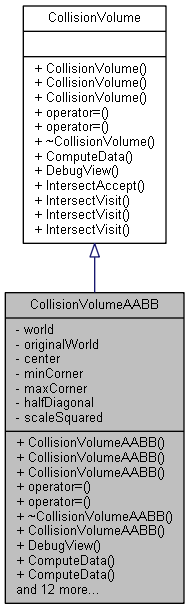
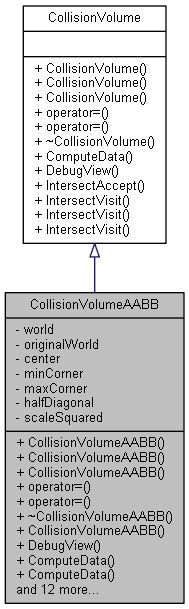
 Public Member Functions inherited from CollisionVolume Public Member Functions inherited from CollisionVolume | |
| CollisionVolume ()=default | |
| Default constructor. More... | |
| CollisionVolume (const CollisionVolume &)=delete | |
| Copy constructor. More... | |
| CollisionVolume (CollisionVolume &&)=delete | |
| Move constructor. More... | |
| CollisionVolume & | operator= (const CollisionVolume &)=default |
| Assignment operator. More... | |
| CollisionVolume & | operator= (CollisionVolume &&)=delete |
| Move assignment operator. More... | |
| virtual | ~CollisionVolume ()=default |
| Deconstructor. More... | |
Private Attributes | |
| Matrix | world |
| Matrix | originalWorld |
| Vect | center |
| Stored Center from ComputeData. More... | |
| Vect | minCorner |
| Stored minimum corner from ComputeData. More... | |
| Vect | maxCorner |
| Stored maximum corner from ComputeData. More... | |
| Vect | halfDiagonal |
| float | scaleSquared |
| CollisionVolumeAABB::CollisionVolumeAABB | ( | ) |
Default constructor.
|
delete |
Copy constructor.
|
delete |
Move constructor.
|
virtualdefault |
Deconstructor.
| CollisionVolumeAABB::CollisionVolumeAABB | ( | Model * | pModel | ) |

|
overridevirtual |
Calculates the data that is required for the AABB to know.
| [in,out] | pModel | If non-null, the model. |
| mat | The world matrix. |
Implements CollisionVolume.
|
virtual |

|
overridevirtual |
Call to visualize the internal AABB from a generic CollisionVolume type.
| col | The color. |
Implements CollisionVolume.

| Vect CollisionVolumeAABB::GetCenter | ( | ) | const |
Gets the center of the AABB and returns it.
| Vect CollisionVolumeAABB::GetHalfDiagonal | ( | ) | const |
Gets half diagonal.

| Vect CollisionVolumeAABB::GetMax | ( | ) | const |
Gets the maximum of the AABB (calculated through ComputeData) and returns it.
| Vect CollisionVolumeAABB::GetMin | ( | ) | const |
Gets the minimum of the AABB (calculated through ComputeData) and returns it.

| Matrix CollisionVolumeAABB::GetOriginalWorld | ( | ) | const |
| float CollisionVolumeAABB::GetScale | ( | ) | const |
Gets the scale.

| Matrix CollisionVolumeAABB::GetWorld | ( | ) | const |
Gets the world matrix.
|
overridevirtual |
Intersect accept for a generic collision volume.
| otherVolume | The other volume. |
Implements CollisionVolume.

|
overridevirtual |
Intersect visit for another collision volume of similar type (AABB).
| other | The other collision volume. |
Implements CollisionVolume.

|
overridevirtual |
Intersect visit for another collision volume of type BSphere.
| other | The other BSphere. |
Implements CollisionVolume.

|
overridevirtual |
Intersect visit for another collision volume of type OBB.
| other | The other collision volume. |
Implements CollisionVolume.

|
delete |
Move assignment operator.
|
delete |
Assignment operator.
| void CollisionVolumeAABB::SetMinMax | ( | Vect & | min, |
| Vect & | max | ||
| ) |
Sets minimum and maximum corners of the AABB, no additional computation.
| [in,out] | min | The minimum. |
| [in,out] | max | The maximum. |
|
private |
Stored Center from ComputeData.
|
private |
|
private |
Stored maximum corner from ComputeData.
|
private |
Stored minimum corner from ComputeData.
|
private |
|
private |
|
private |
 1.8.18
1.8.18