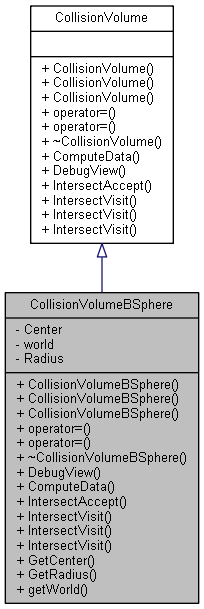
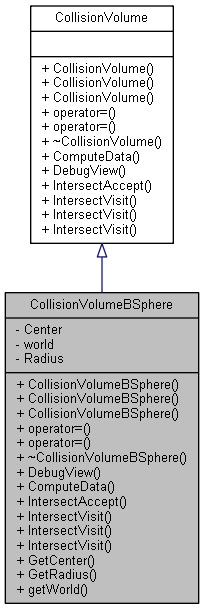
#include <CollisionVolumeBSphere.h>
◆ CollisionVolumeBSphere() [1/3]
| CollisionVolumeBSphere::CollisionVolumeBSphere |
( |
| ) |
|
|
default |
◆ CollisionVolumeBSphere() [2/3]
◆ CollisionVolumeBSphere() [3/3]
◆ ~CollisionVolumeBSphere()
| virtual CollisionVolumeBSphere::~CollisionVolumeBSphere |
( |
| ) |
|
|
virtualdefault |
◆ ComputeData()
| void CollisionVolumeBSphere::ComputeData |
( |
Model * |
mod, |
|
|
const Matrix & |
mat |
|
) |
| |
|
overridevirtual |
Calculates and passes any data necessary to the BSphere.
- Parameters
-
| [in,out] | mod | If non-null, the model pointer. |
| mat | The matrix. |
Implements CollisionVolume.
◆ DebugView()
| void CollisionVolumeBSphere::DebugView |
( |
const Vect & |
col | ) |
const |
|
overridevirtual |
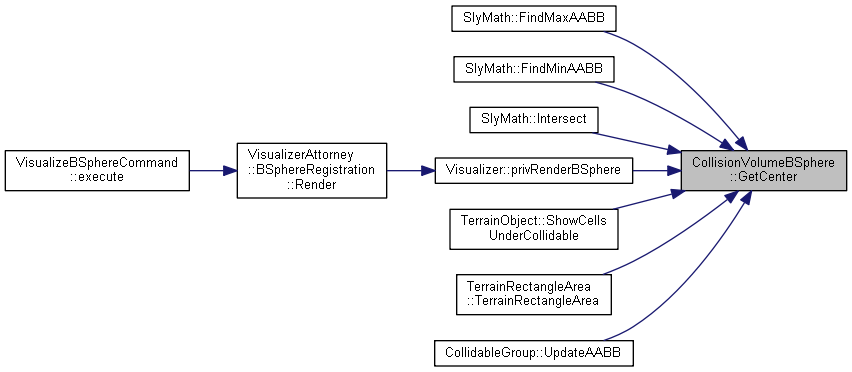
◆ GetCenter()
| Vect CollisionVolumeBSphere::GetCenter |
( |
| ) |
const |
Gets the center.
- Returns
- The center.
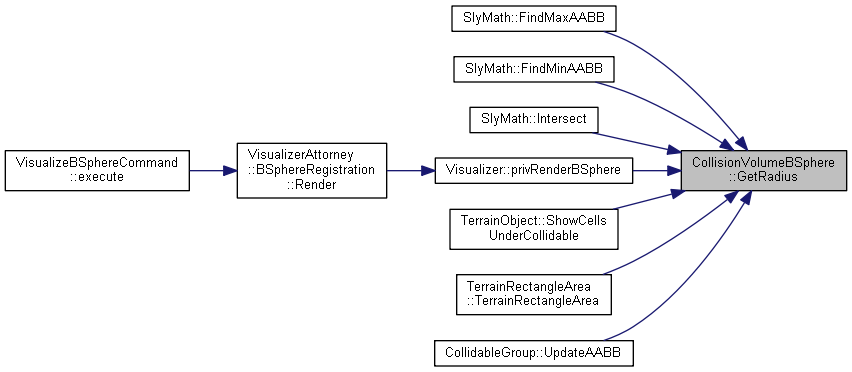
◆ GetRadius()
| float CollisionVolumeBSphere::GetRadius |
( |
| ) |
const |
Gets the radius.
- Returns
- The radius.
◆ getWorld()
| Matrix CollisionVolumeBSphere::getWorld |
( |
| ) |
|
◆ IntersectAccept()
| bool CollisionVolumeBSphere::IntersectAccept |
( |
const CollisionVolume & |
other | ) |
const |
|
overridevirtual |
Intersect accept utilizing the visitor pattern.
- Parameters
-
| other | The other collision volume. |
- Returns
- True if it succeeds, false if it fails.
Implements CollisionVolume.
◆ IntersectVisit() [1/3]
Intersect call for AABB. Utilizing the visitor pattern.
- Parameters
-
| other | The other collision volume. |
- Returns
- True if it succeeds, false if it fails.
Implements CollisionVolume.
◆ IntersectVisit() [2/3]
Intersect visit for Sphere, using the visitor pattern.
- Parameters
-
| other | The other collision volume. |
- Returns
- True if it succeeds, false if it fails.
Implements CollisionVolume.
◆ IntersectVisit() [3/3]
Intersect call for OBB. Utilizing the visitor pattern.
- Parameters
-
| other | The other collision volume. |
- Returns
- True if it succeeds, false if it fails.
Implements CollisionVolume.
◆ operator=() [1/2]
Move assignment operator.
◆ operator=() [2/2]
◆ Center
| Vect CollisionVolumeBSphere::Center |
|
private |
◆ Radius
| float CollisionVolumeBSphere::Radius |
|
private |
◆ world
| Matrix CollisionVolumeBSphere::world |
|
private |
The documentation for this class was generated from the following files:

 Public Member Functions inherited from CollisionVolume
Public Member Functions inherited from CollisionVolume





 1.8.18
1.8.18